智能材料驱动器中的回滞模型构建、回滞逆补偿器设计、智能材料驱动器驱动运动自适应控制。
智能材料驱动器的研究涉及材料科学、机械工程、电子工程、控制理论等多个学科领域,由于其行程小、精度高、快速响应等特点,被广泛应用在医疗、航空航天、机器人、智能家居等。
(1)多功能性:智能材料驱动器具有多种功能,如变形、运动、传感等,可以广泛应用于医疗、航空航天、机器人、智能家居等领域。
(2)智能控制:智能材料驱动器的控制是实现其功能的关键。开发智能控制方法,包括基于传感器的反馈控制和自适应控制等,以实现更加精确的控制和更高效的运作。
(3)新型智能材料:随着材料科学的发展,研究人员正在不断探索新型的智能材料。例如,自修复材料、生物匹配材料、纳米材料等,这些材料具有更多的特性和应用潜力。
高水平SCI期刊论文30余篇。国家发明专利一项。
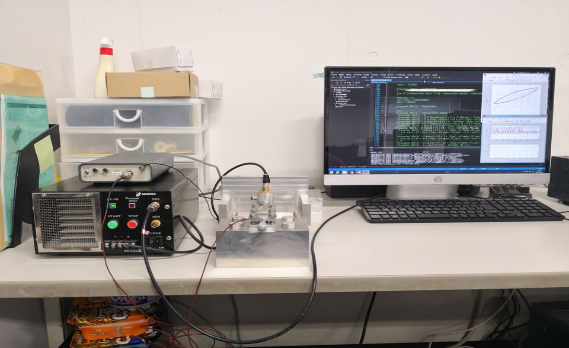

图1 单轴压电驱动器控制平台 图2 压电定位平台结构示意图
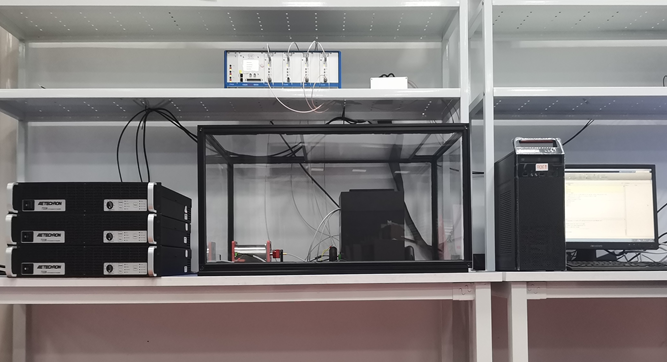
 图3 三轴超磁致伸缩驱动云台 图4 介电弹性体仿生驱动控制平台
图3 三轴超磁致伸缩驱动云台 图4 介电弹性体仿生驱动控制平台
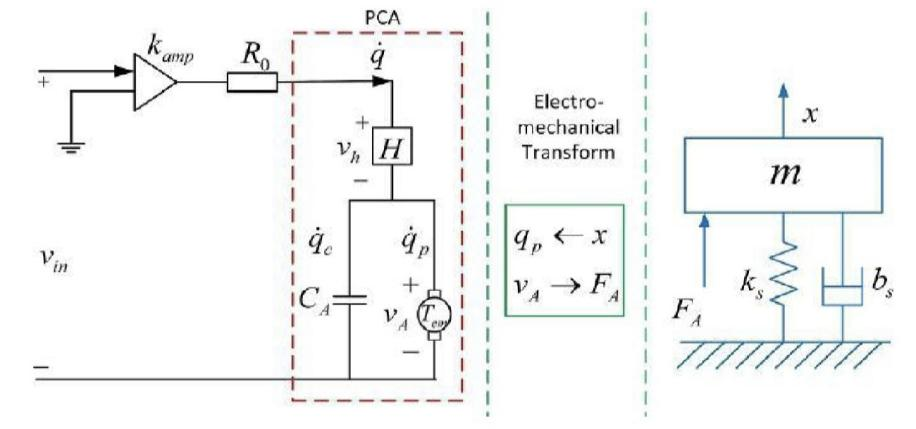
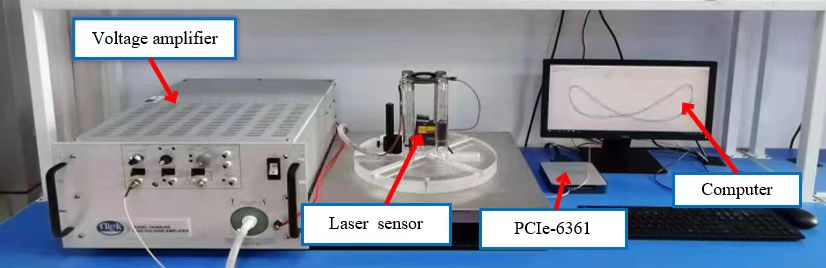 图5 压电定位平台模型示意图 图6 实验环境
图5 压电定位平台模型示意图 图6 实验环境
多智能体地面机器人与飞行器协同控制方案设计,控制模型构建。
Quanser的室内无人工具实验系统是一个集合无人飞行器和地面无人机器人为一体的多目标教学和研发平台。Quanser公司的无人工具(UVS)实验系统为广大研究人员提供了一个实现多智能体协调控制的工具,用户很方便地就可以将自己的控制器和算法通过这个平台工具进行实现及验证。应用范围包括无人工具的动态建模和控制研究、运动规划、避障控制、机器视觉、机器学习、多信息融合、编队控制等多个领域。
整个系统的控制软件都是基于Quanser公司研发的,完全基于MATLAB/SIMULINK的实时控制软件QuaRC。很方便地将Simulink仿真框图编译并下载到各装置的处理器,然后进行实时控制,不需要其它语言编程要求。对于本系统,QuaRC支持基于嵌入式控制器(Gumstix DuoVero)和数据采集板卡的工具及模块。工作原理采用Host-Target模式,控制器开发在装有MATLAB/Simulink的Host主机实现,控制器搭建完成后直接在Simulink下进行编译并通过无线通讯协议下载到无人工具的嵌入式控制器(target机)就可以进行实时控制了。此外,一台Host主机可以同时控制多台不同的嵌入式Target机器,从而很方便地就可以在MATLAB环境下进行多智能体系统控制研究。
高水平SCI期刊论文10余篇。
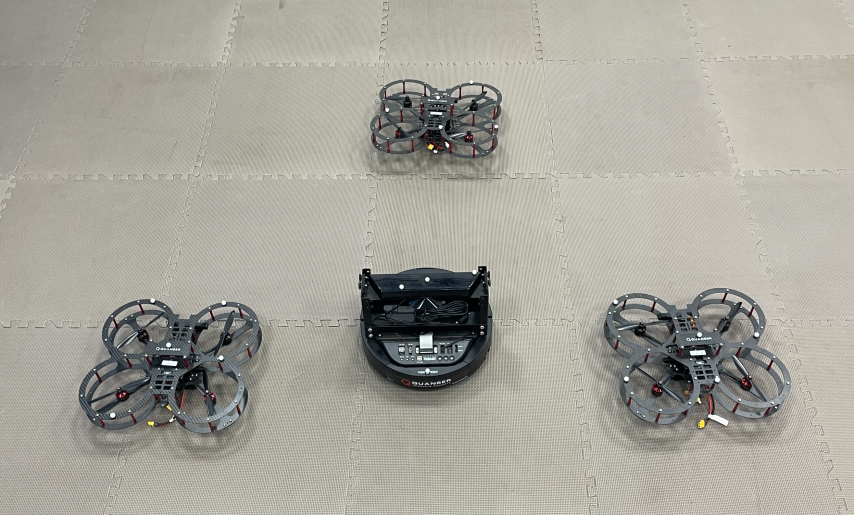
图7 四旋翼飞行器与地面机器人

图8 四旋翼飞行器近距离视角

图9 地面机器人
利用先进的控制理论、人工智能、信息技术等手段,对电力系统进行智能化控制,以实现发电及电力系统的高效、安全、可靠运行。
(1)发电智能控制:通过对发电机组的控制,实现对发电机组的启停、功率控制、电压控制、频率控制等,以保证发电机组的运行安全和经济性。
(2)输电智能控制:通过对输电线路、变电站等的控制,实现对电力输送的安全、稳定和可靠运行,包括故障检测、故障定位、自动重启等功能。
(3)配电智能控制:通过对配电网的控制,实现对配电网的监测、调度、优化和自动化控制,以提高配电网的运行效率和可靠性。
(4)负荷智能控制:通过对负荷侧的控制,实现对负荷的动态调节和平衡,包括对负荷的预测、控制、优化和节能等。
(5)智能优化调度:通过对电力系统的运行数据进行分析和处理,实现对电力系统的优化调度,包括负荷预测、电量预测、电价预测、电力市场交易等。
(1)自动化程度高:电力系统智能控制系统采用先进的自动化技术,可以实现对发电、输电、配电等各个环节的自动化控制,减少人工干预。
(2)智能化程度高:电力系统智能控制系统采用了先进的人工智能技术,能够对电力系统的运行状态进行分析和预测,并自动调节控制参数以优化电力系统的运行效率。
(3)可靠性高:电力系统智能控制系统具有高可靠性和安全性,能够在电力系统发生异常时及时响应,实现快速切换和恢复电力系统的正常运行状态。
(4)灵活性强:电力系统智能控制系统具有灵活性和可扩展性,可以根据电力系统的实际情况进行定制和修改,以满足不同的需求。
(5)维护成本低:电力系统智能控制系统采用模块化设计,方便维护和升级,同时采用先进的自诊断技术,可以快速发现和排除故障。
高水平SCI期刊论文10余篇。
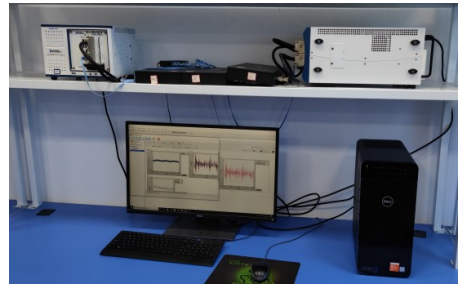
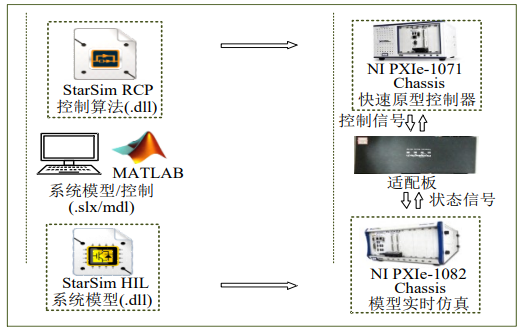 图10 实验环境 图11 实验平台的硬件结构图
图10 实验环境 图11 实验平台的硬件结构图
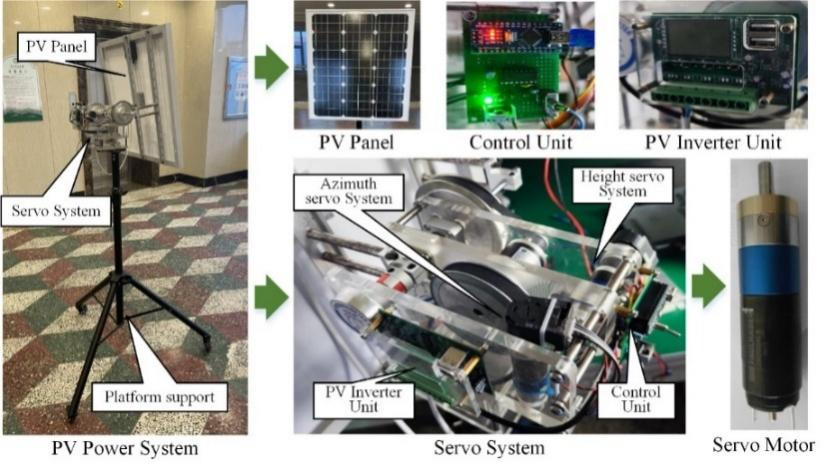
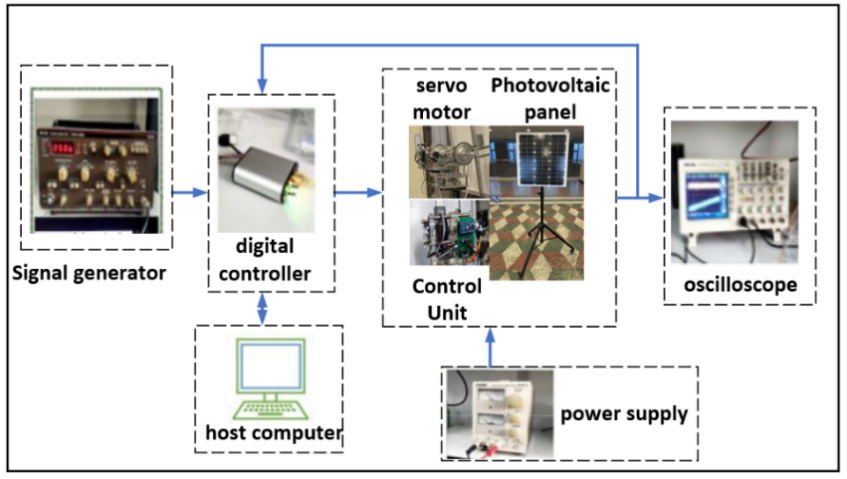 图12 伺服电机的物理图 图13 实物实验平台硬件关系图
图12 伺服电机的物理图 图13 实物实验平台硬件关系图